Продолжаем тему - самодельный ЧПУ плоттер. Сегодня поменяем Arduino UNO на ESP32. Настроим работу с сервоприводом в качестве оси Z. Подключим конечные выключатели. А также научим станок находить позицию Дом (Home), не смотря на то что у нас вместо оси Z servo. Как это все настроить и подключить, сейчас рассмотрим.
Подробнее о проекте ЧПУ плоттер:
Как написано в документации к прошивке ESP32 GRBL, можно использовать servo вместо любой оси. Настройки аналогичны шаговому двигателю.
Кроме этого поддерживаются все параметры, что и для шагового двигателя.
Возможность настройки расстояния перемещения, ускорение и настроить в какую позицию должен вернуться сервопривод, при выполнении команды Дом (Home).
За основу возьмём конфигурацию машины «3axis_v4.h» из прошлого проекта: Лазерный гравер на ESP32. Прошивка GRBL_ESP32.
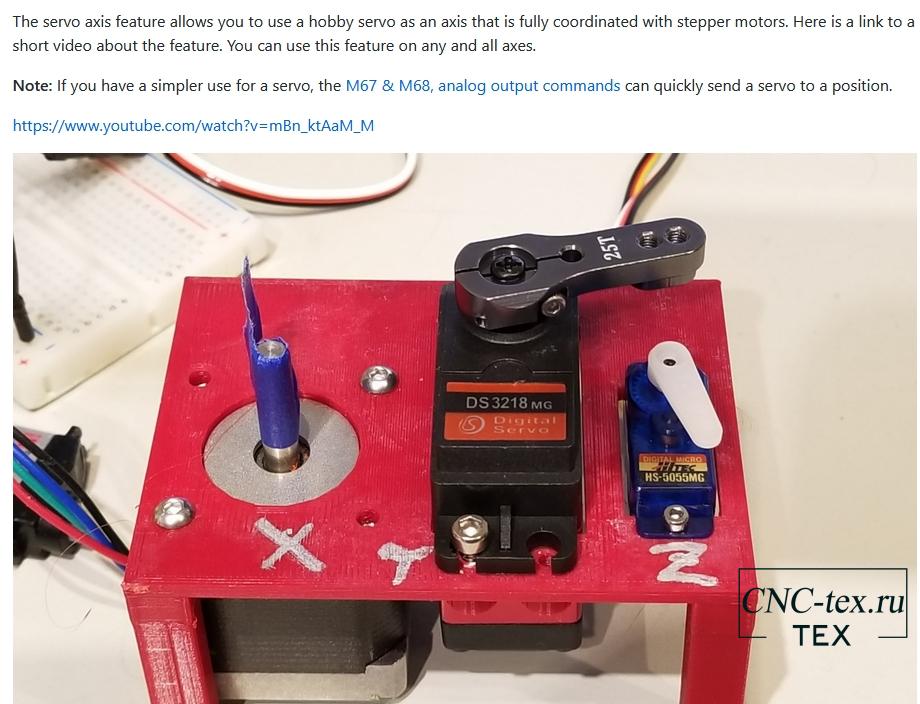
На сайте предложен вот такой пример подключения сервопривода в качестве оси Z.
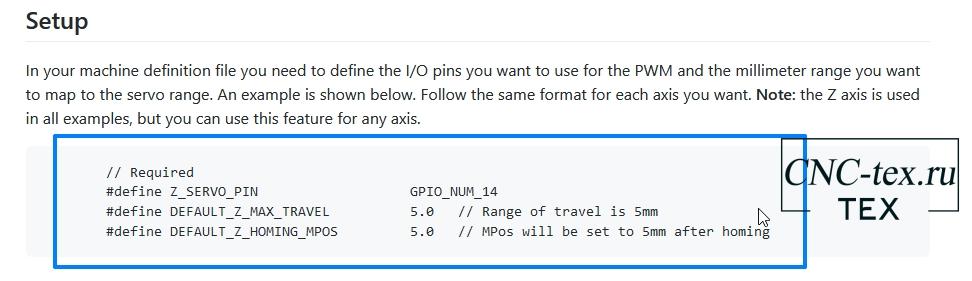
Я не стал сильно менять пример. Только поменял пин подключения на 2, к которому подключал лазер в предыдущем проекте. Получилась вот такая настройка для оси Z.

#define DEFAULT_Z_MAX_TRAVEL5.0
Максимальное перемещение по оси Z.
#define DEFAULT_Z_HOMING_MPOS5.0
При нажатии кнопки Домой, сервопривод вернется в максимальное положение 5 мм. Это оптимальное решение, так как мы будем перемещаться в отрицательном направлении при обработке (в процессе рисования).
Основные настройки в конфигурации машины получились вот такие.
Также настроил конечные выключатели для осей X и Y. Для оси Z настраивать конечный выключатель не нужно. Это связанно с тем, что сервопривод может определить свое положение.
Это все основные настройки прошивки. Сейчас прошивку можно загрузить. Как это сделать и как настроить GRBL_ ESP32 читайте в статье: Установка и настройка GRBL ESP32
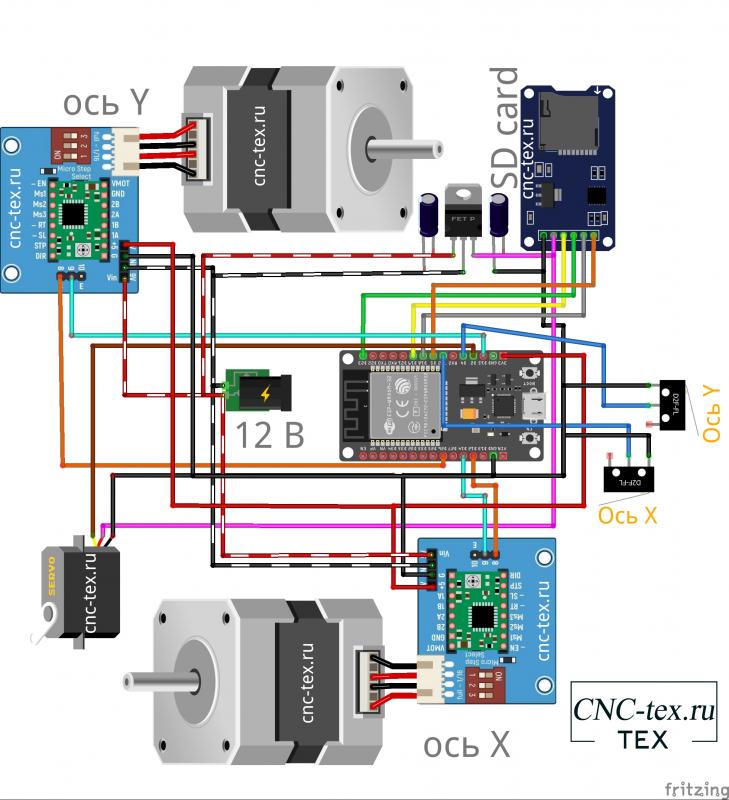
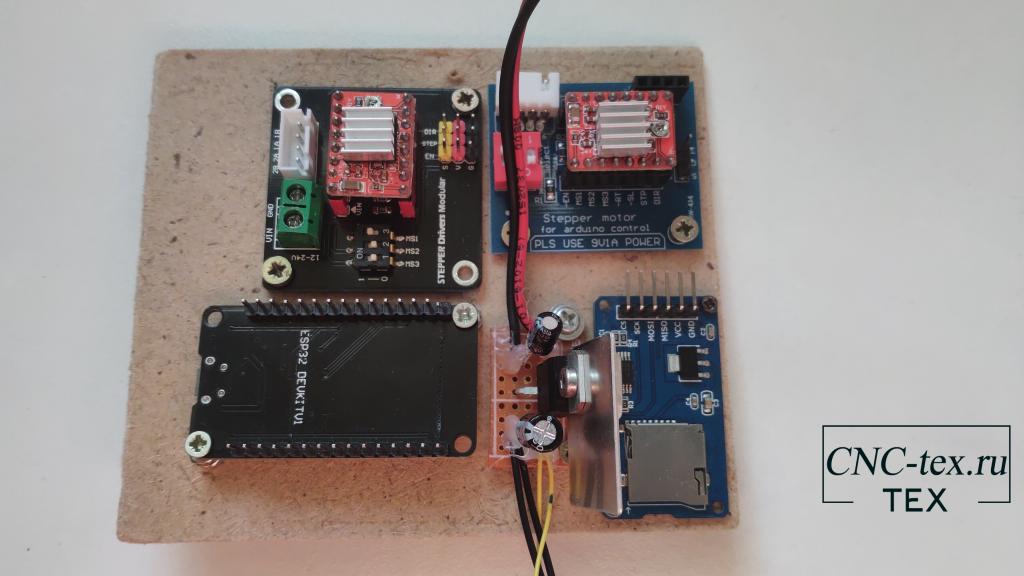
Сейчас осталось все подключить. Так как во время работы было выявлено, что стабилизатор на 5 В не справляется, при подключении к нему сервопривода, ESP32 и картридера. Пришлось запитать ESP32 от отдельного источника питания. В итоге получилась вот такая схема.
Установил электронику на фанерку.
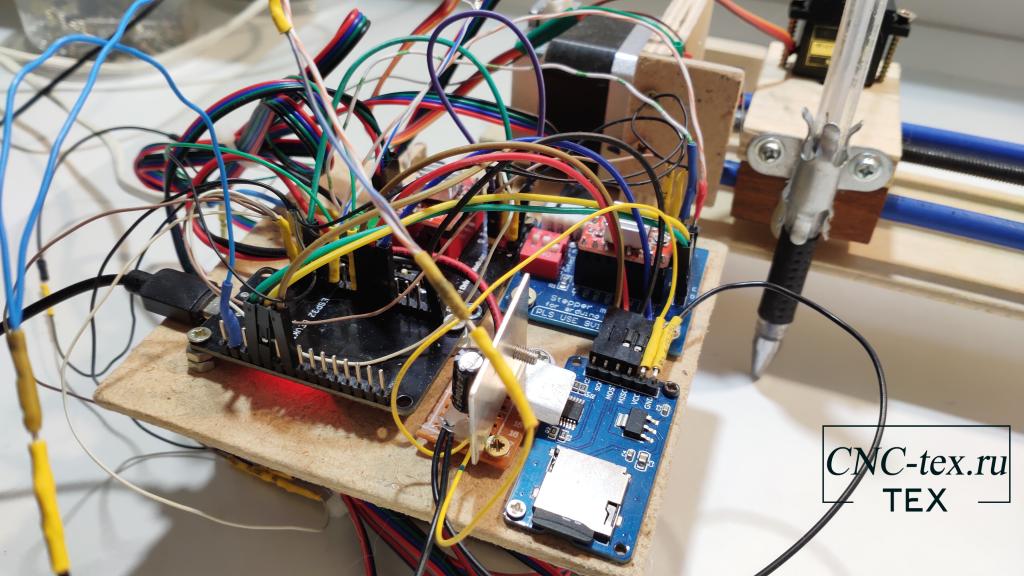
Затем закрепил фанерку с электроникой над шаговым двигателем оси Y.
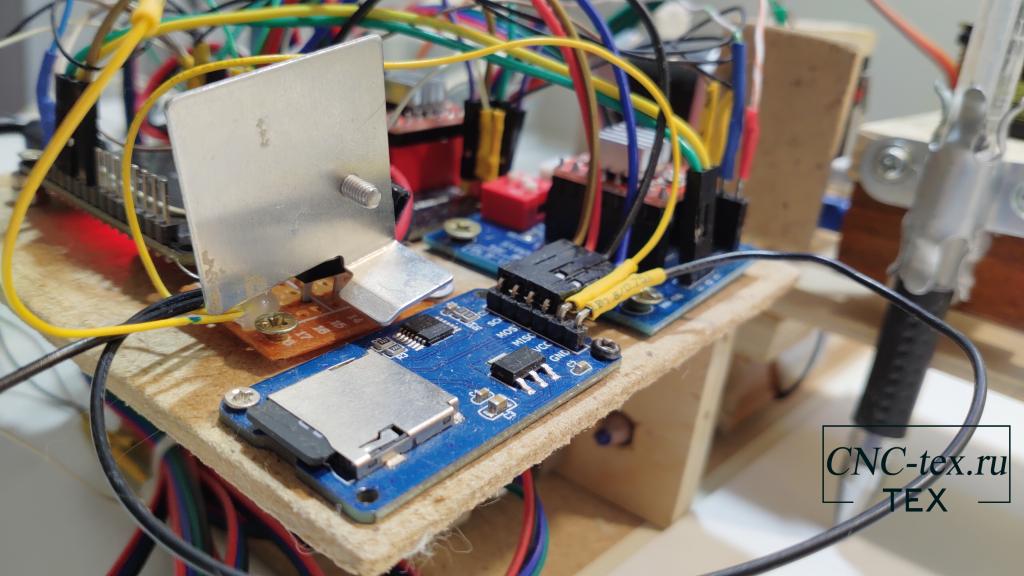
Соединил все проводами, так как установлены конечные выключатели. А также не хватило длины штатных проводов servo, пришлось их нарастить. В итоге получилось вот паутина из проводов, но несмотря на это, все работает отлично.
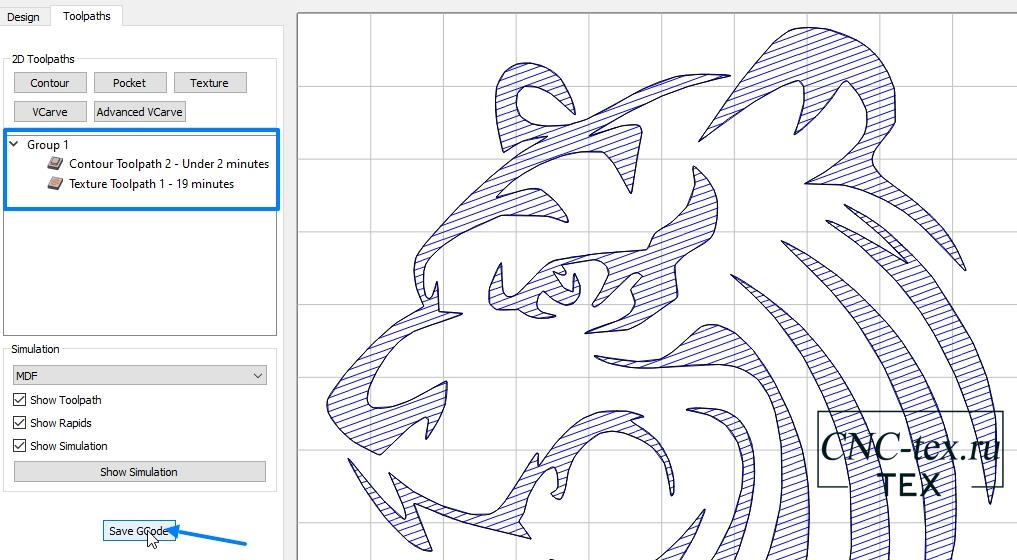
В связи с тем, что сервопривод работает как ось Z, создание G-Code будет аналогичное, как мы делали при использовании прошивки «Grbl Pen Servo» для протёрта на Arduino UNO.
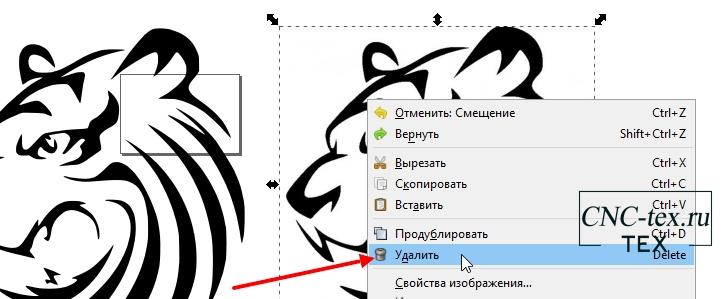
А именно нам понадобятся программы: Inkscape, Carbide Create V5. Подробнее читайте в статье: G-Code для плоттера на Arduino.
После создания G-Code, остается загрузить код по Wi-Fi и запустить гравировку.
Изначально планировал нарисовать вот такой красивый узор.
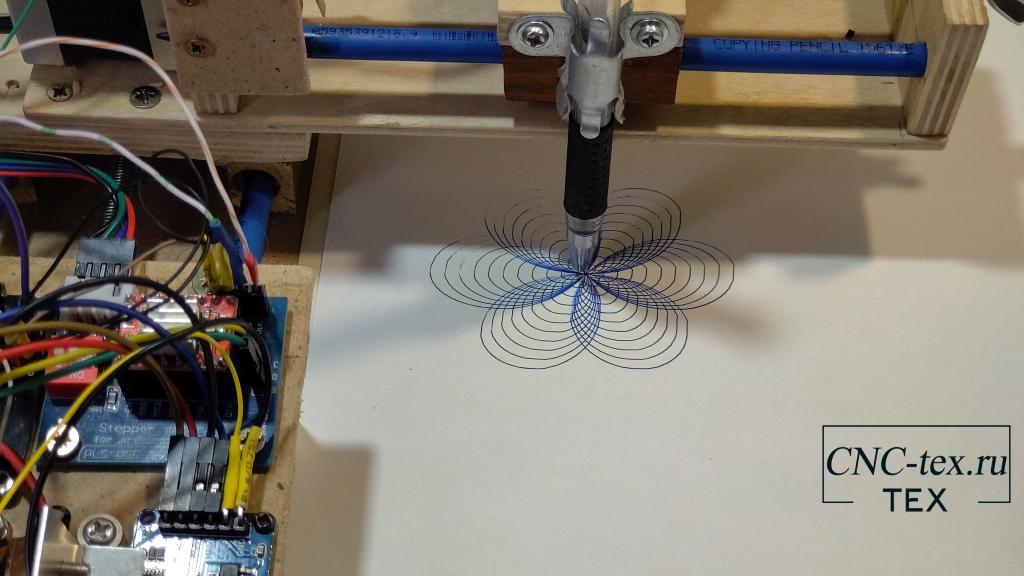
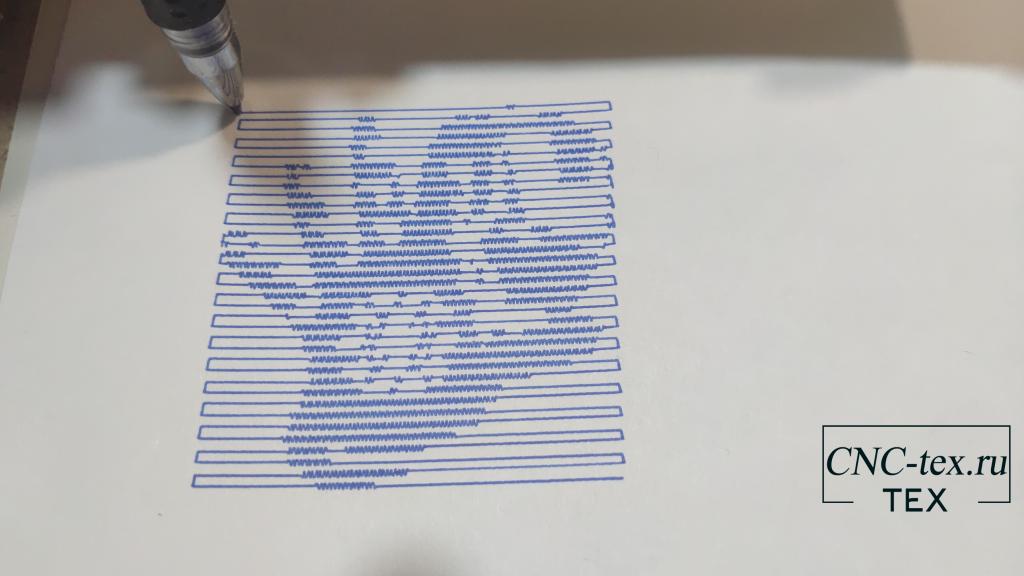
Но на бумаге видать было жирное пятно или какой-то другой дефект, и в одном углу рисунок просто не прорисовался. Поэтому решил нарисовать повторно, но уже другое изображение, сделанное с помощью программы: Plotterfun веб приложении для созданий графических изображений для ЧПУ плоттера, гравера.
В итоге вот такой получился результат. Все работает отлично и рисунки получаются красивые.
Вывод.
Подведем итог. Плоттер на ESP32 работает. И имеет ряд преимуществ, перед плоттером на Arduino:
Но есть и недостатки, в основном аналогичные с прошивкой «Grbl Pen Servo»:
Буду изучать данную тему дальше. Возможно, найду решение недостаткам использования прошивке GRBL_ ESP32 в плоттере.
Понравился проект ESP32 GRBL плоттер. Конечные выключатели. Позиция Home? Не забудь поделиться с друзьями в соц. сетях.
также подписаться на наш канал на YouTube, вступить в группу Вконтакте, в группу на Facebook.
Спасибо за внимание!
Технологии начинаются с простого!
Фотографии к статье







Файлы для скачивания
| 3axis_v4.h.zip | 1 Kb | 1071 | Скачать | |
| Grbl_Esp32.zip | 865 Kb | 1058 | Скачать | |
| libraries.zip | 82 Kb | 1031 | Скачать | |
| iron-man.svg | 248 Kb | 1239 | Скачать | |
| Узор.svg | 53 Kb | 1222 | Скачать |
Спасибо за ваш труд. Единственный сайт на котором написано доступным языком про ESP GRBL
![]()
3 суток уже немогу заставить серву работать с этой прошивкой ..Смотрите внимательно. Моя прошивка уже настроена для работы. Возможно вы не там меняете или не к тому пину подключаете.
я уже и ваш архив заливал устанавливал. (ну только пин менял с 2 на 27) и с гитхаба скачивал ..
и подключал всеми способами и выбирал пен_ласер в папке машин и по всякому ))
что я делаю не так ))
3 суток уже немогу заставить серву работать с этой прошивкой ..
я уже и ваш архив заливал устанавливал. (ну только пин менял с 2 на 27) и с гитхаба скачивал ..
и подключал всеми способами и выбирал пен_ласер в папке машин и по всякому ))
что я делаю не так ))

Самодельные ЧПУ станки
1 апреля , 2021
Комментариев:3
Файлов для скачивания:5
Фото:7
Понравилась статья? Нажми
Читайте также
Мы в соц сетях



Комментарии