Драйвер шагового двигателя A4988 является электронным устройством, которое заставляет вращаться шаговый двигатель, путем совершение шагов. Данное устройство незаменимо при разработке высокоточных ЧПУ станков и 3D принтеров.
Для создания высокоточных станков используют шаговые двигатели, которые обладают рядом преимуществ перед коллекторными двигателями:
Спектр применения шаговых двигателей очень большой. Вы пользуетесь офисной техникой и не подозреваете, что управляет вашим ксероксом, принтером, факсом, 3D принтером шаговые двигатели.
Управляет шаговым двигателем драйвер. Driver с английского языка «водитель». Одним из недорогих драйверов, и в связи с этим достаточно популярным, является драйвер A4988. Модуль A4988 имеет защиту от перегрузки и перегрева. Одним из параметров шаговых двигателей является количество шагов на один оборот 360°. Например, для шаговых двигателей Nema17 это 200 шагов на оборот, т.е 1 шаг равен 1.8°. Драйвер A4988 позволяет увеличить это значение за счёт возможности управления промежуточными шагами и имеет пять режимов микрошага (1(полный), 1/2, 1/4, 1/8 и 1/16).
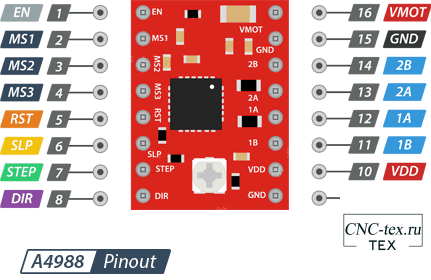
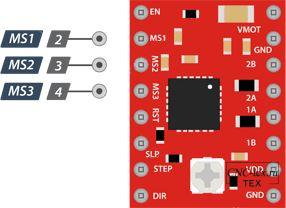
Драйвер A4988 имеет всего 16 контактов, которые позволяют управлять шаговыми двигателями. Распиновка у A4988 следующая:
Драйвер A4988 допускает использование режима микрошага. Это достигается за счет подачи питания на катушки с промежуточными уровнями тока.
Например, если вы решите управлять шаговым двигателем NEMA 17 с шагом 1,8 градуса (200 шагов на оборот) в режиме 1/4 шага, то двигатель будет выдавать 800 микрошагов на оборот.
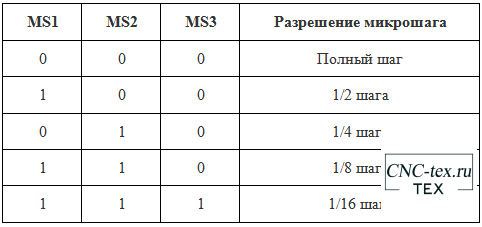
Драйвер A4988 имеет три вывода селектора размера шага (разрешения), а именно: MS1, MS2 и MS3. Установив соответствующие логические уровни на эти контакты, мы можем настроить двигатели на одно из пятиступенчатых разрешений.
По умолчанию эти три контакта подтянуты к земле внутренним резистором. Если мы оставим эти выводы не подключенными, то двигатель будет работать в режиме полного шага.
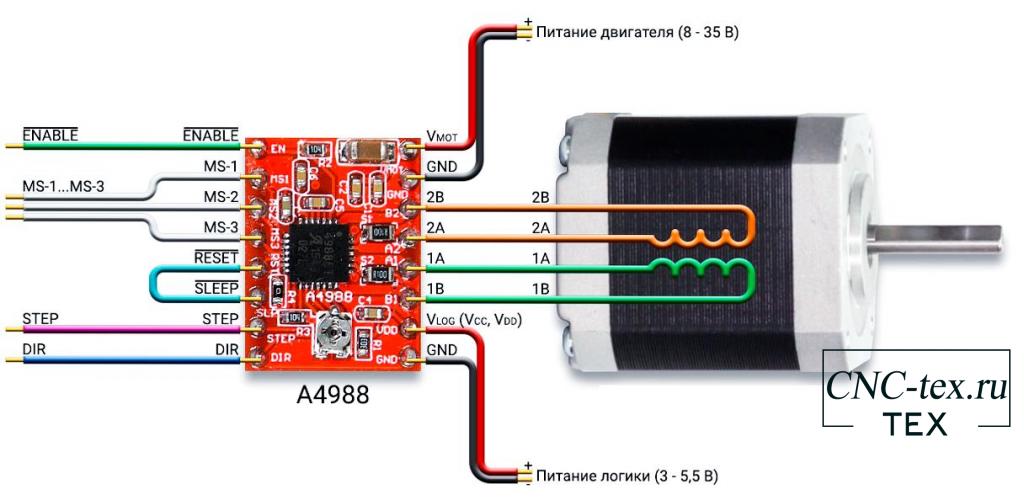
Драйвер A4988 имеет два управляющих вывода, а именно: STEP и DIR.
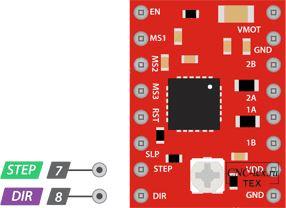
STEP — управляет микрошагом мотора. Каждыйвысокий импульс, отправляемый на этот вывод, приводит двигатель в действие на количество микрошагов, заданное выводами Microstep Selection (MS1, MS2 и MS3). Чем быстрее импульсы, тем быстрее будет вращаться двигатель.
DIR — управляет направлением вращения двигателя. Если на него подать высокий уровень, то двигатель будет вращаться по часовой стрелке, а если низкий — против часовой стрелки.
Если вы просто хотите, чтобы двигатель вращался только в одном направлении, то вы можете соединить вывод DIR непосредственно с VCC или GND соответственно.
Выводы STEP и DIR не подтянуты внутренними резисторами, поэтому вы не должны оставлять их не подключенными.
A4988 имеет три различных вывода для управления состоянием питания, а именно. EN, RST и SLP.
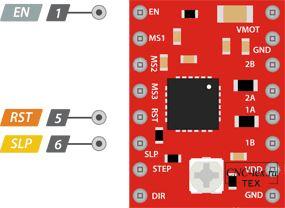
EN — вывод включения (0)/ выключения (1) драйвера A4988. По умолчанию на этом выводе установлен низкий уровень, поэтому драйвер всегда включен.
SLP — подача на данный вывод сигнала низкого уровня переводит драйвер в спящий режим, сводя к минимуму потребление энергии. Вы можете использовать этодля экономии энергии.
RST — при подаче сигнала низкого уровня все входные данные STEP игнорируются, до тех пор, пока не будет установлен высокий уровень. Низкий уровень также сбрасывает драйвер, устанавливая внутренний транслятор в предопределенное состояние Home. Исходное состояние — это в основном начальное положение, с которого запускается двигатель, и оно различается в зависимости от разрешения микрошага.
Выходные контакты: 1B, 1A, 2A и 2B.
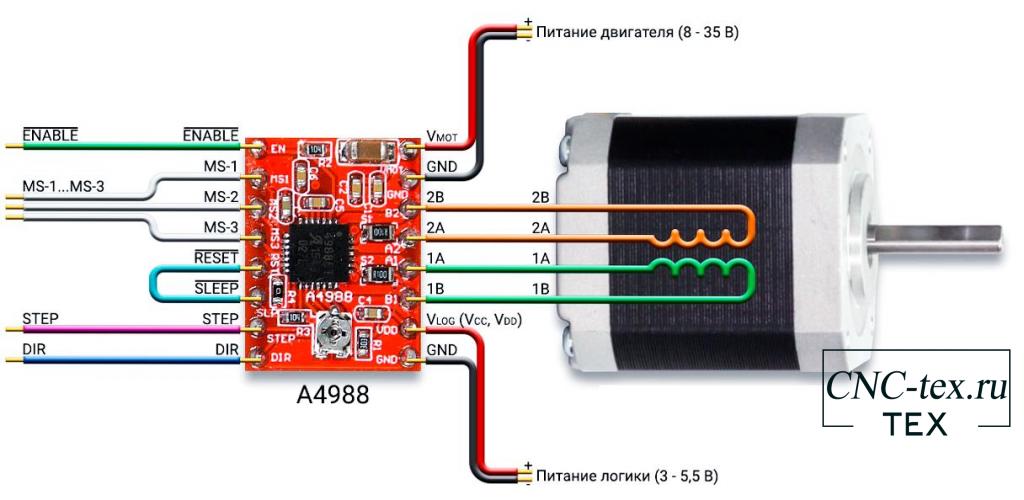
К этим выводам можно подключить любой биполярный шаговый двигатель с напряжением питания от 8 до 35 В.
Каждый выходной контакт модуля может обеспечить ток до 2 А. Однако величина тока, подаваемого на двигатель, зависит от источника питания системы, системы охлаждения и настройки ограничения тока.
Чрезмерное рассеивание мощности микросхемы драйвера A4988 приводит к повышению температуры, которая может выйти за пределы возможностей микросхемы, что, вероятно, приведет к ее повреждению.
Даже если микросхема драйвера A4988 имеет максимальный номинальный ток 2 А на катушку, микросхема может подавать только около 1 А на катушку без перегрева.
Для достижения более 1 А на катушку требуется радиатор или другой метод охлаждения.
Драйвер A4988 обычно поставляется с радиатором. Желательно установить его перед использованием драйвера.
Перед использованием драйвера нам нужно сделать небольшую настройку. Для этого нужно ограничить максимальный ток, протекающий через катушки шагового двигателя, и предотвратить превышение номинального тока двигателя.
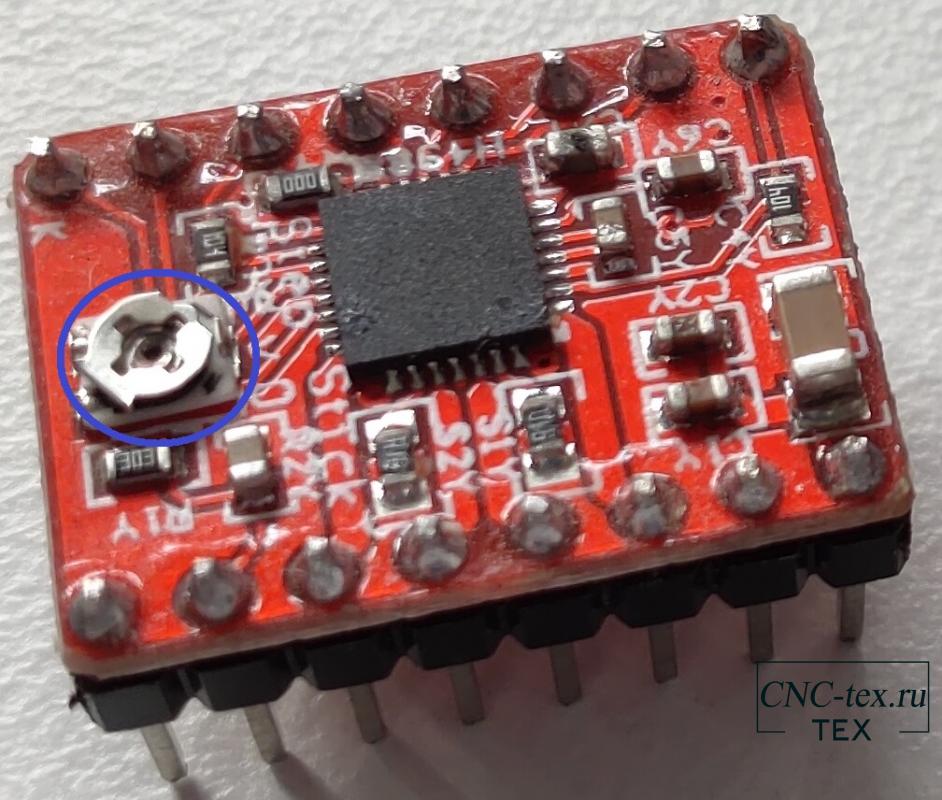
На драйвере A4988 есть небольшой потенциометр, который можно использовать для установки ограничения тока. Вы должны установить ограничение по току равным или ниже номинального тока двигателя.
В данном случае мы собираемся установить ограничение тока путем измерения напряжения (Vref) на выводе «ref».
Vref = Imax * 8 * (RS)
Imax — ток двигателя;
RS — сопротивление резистора. В моем случае RS = 0,100.
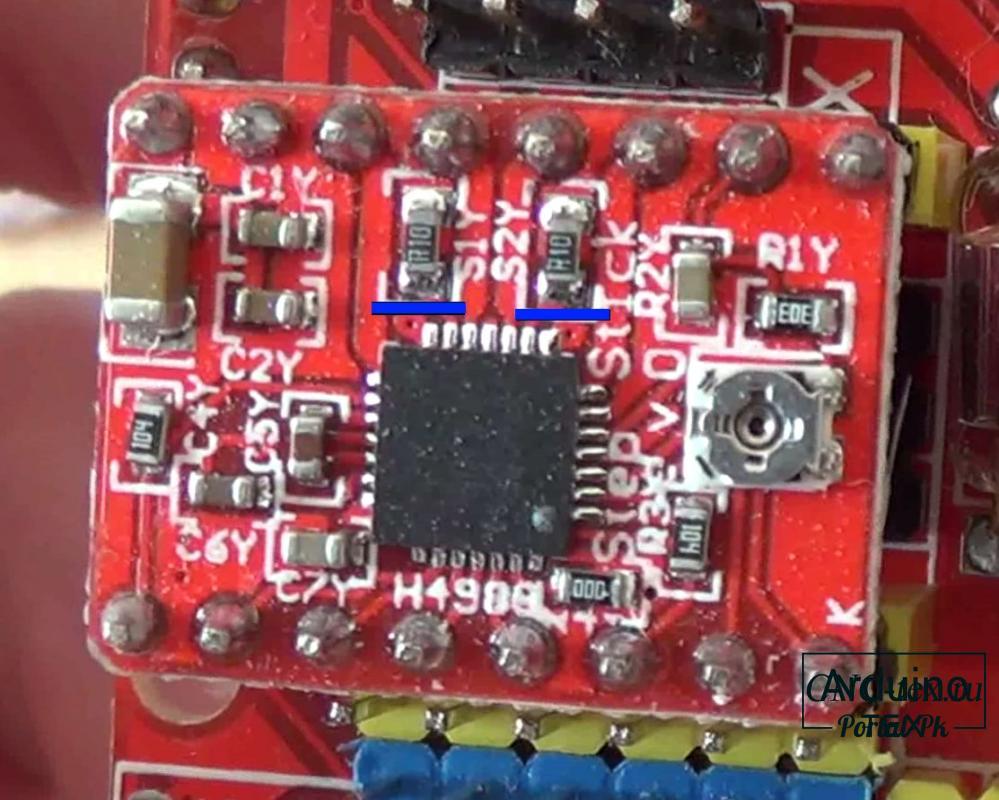
Формула Vref для A4988 изменяется от номинала токочувствительных резисторов. Это два черных прямоугольника на плате драйвера. Обычно подписаны R050 или R100.
В связи с тем что рабочий ток двигателя равен 70% от тока удержания. Полученное значение нам нужно умножить на 0,7. В противном случае двигателя в режиме удержания будут сильно греться.
Для 17HS4401 Vref ист. = 1,36*0,7 = 0,952 В.
Vref = 1,2 * 8 * 0,100 = 0,96 В
Vrefист. = 0,96*0,7 = 0 ,672 В.
Драйвер шагового двигателя A4988 можно подключить к микроконтроллеру, например к Arduino, напрямую.
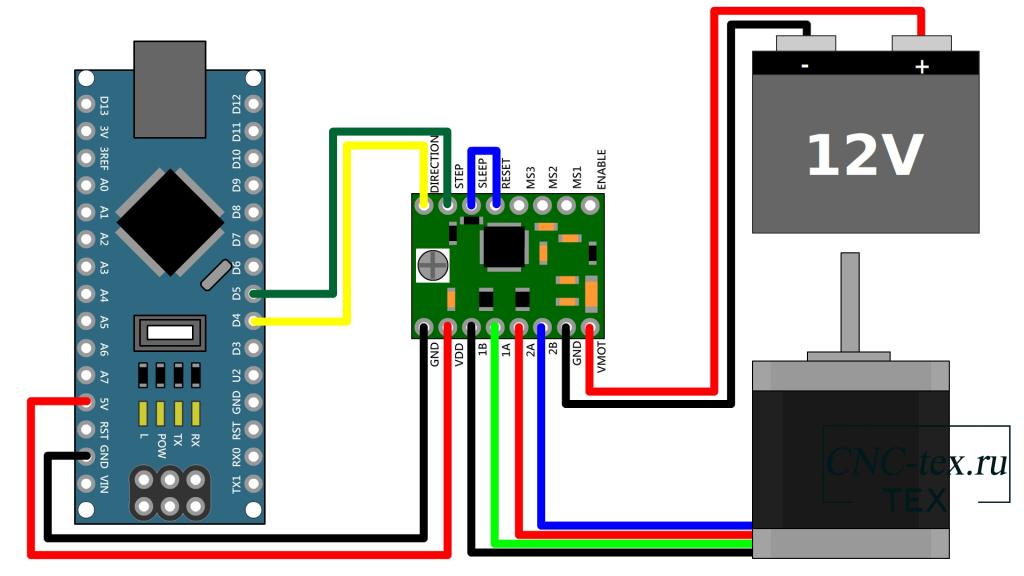
Программа для вращения шагового двигателя NEMA 17, драйвер A4988. Сначала мотор совершает полный оборот в одну сторону, потом в другую.
// Подключаем библиотеку AccelStepper
#include <AccelStepper.h>
// Устанавливаем выводы
const int dirPin = 2;
const int stepPin = 3;
// Определение тип интерфейса двигателя
#define motorInterfaceType 1
// Создаем экземпляр
AccelStepper myStepper(motorInterfaceType, stepPin, dirPin);
void setup() {
// Устанавливаем максимальную скорость, коэффициент ускорения,
// начальную скорость и целевую позицию
myStepper.setMaxSpeed(1000);
myStepper.setAcceleration(50);
myStepper.setSpeed(200);
myStepper.moveTo(200);
}
void loop() {
// Изменение направления вращения, когда двигатель достигнет целевого положения
if (myStepper.distanceToGo() == 0)
myStepper.moveTo(-myStepper.currentPosition());
// Передвинуть на 1 шаг
myStepper.run();
}
Подробнее о подключении шаговых двигателей к Ardiono смотрите на сайте Ардуино технологии.
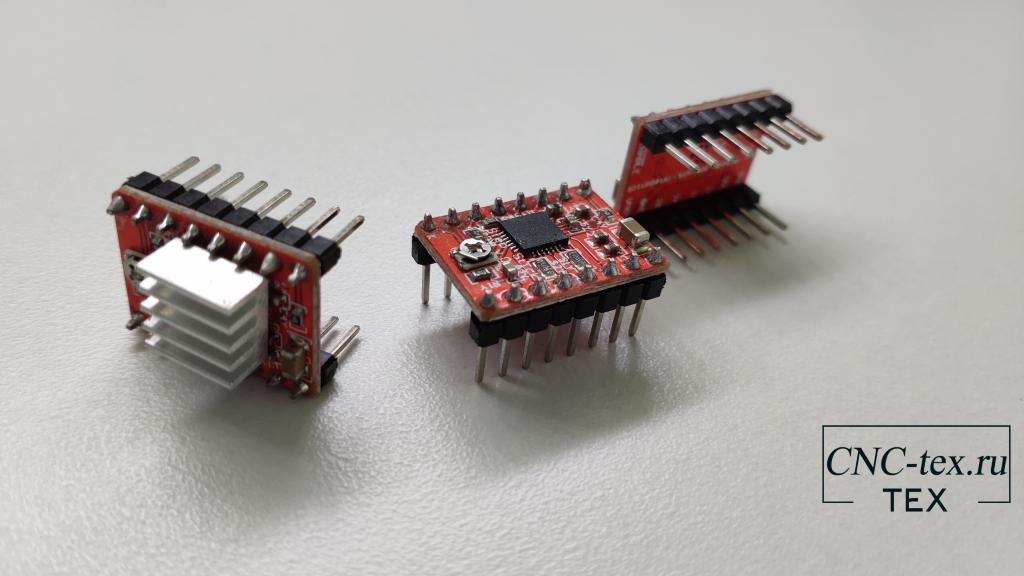
Для более простого подключения шагового двигателя к Arduino или другому микроконтроллеру существуют модули. Модули бывают разные, на фото ниже приведен пример двух различных модулей.
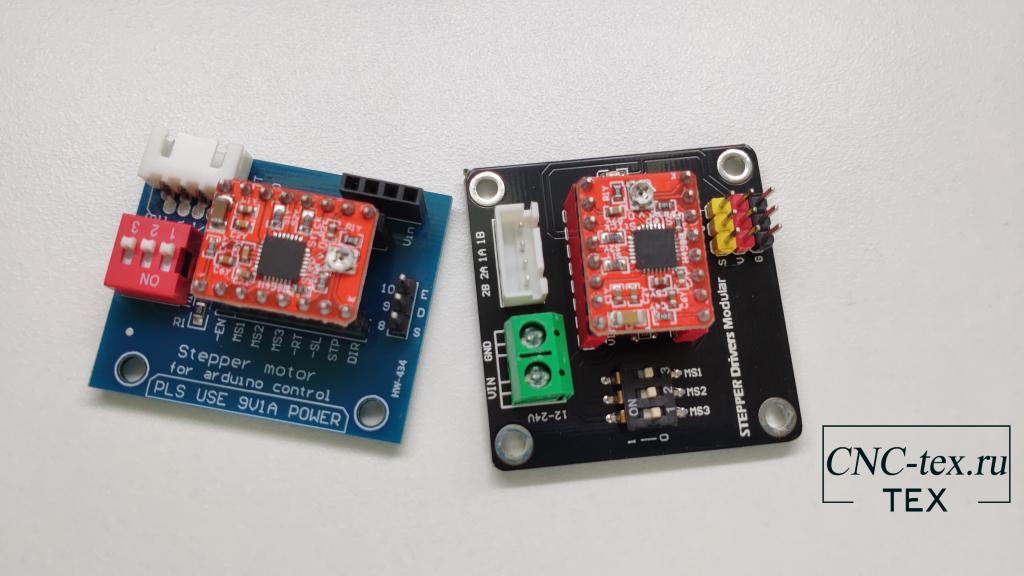
Распиновку и как подключать модуль драйвера A4988 будем рассматривать в следующей статье.
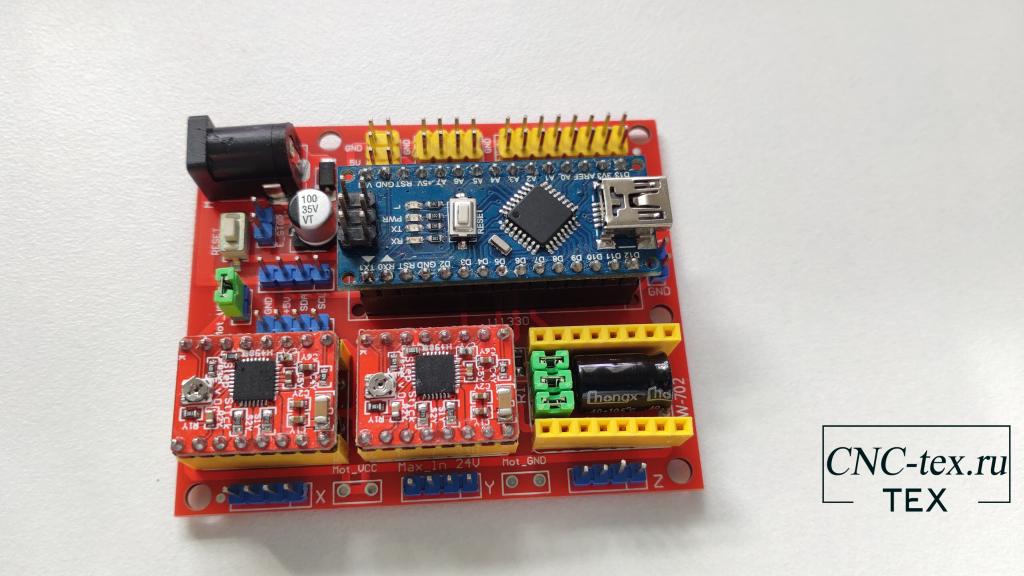
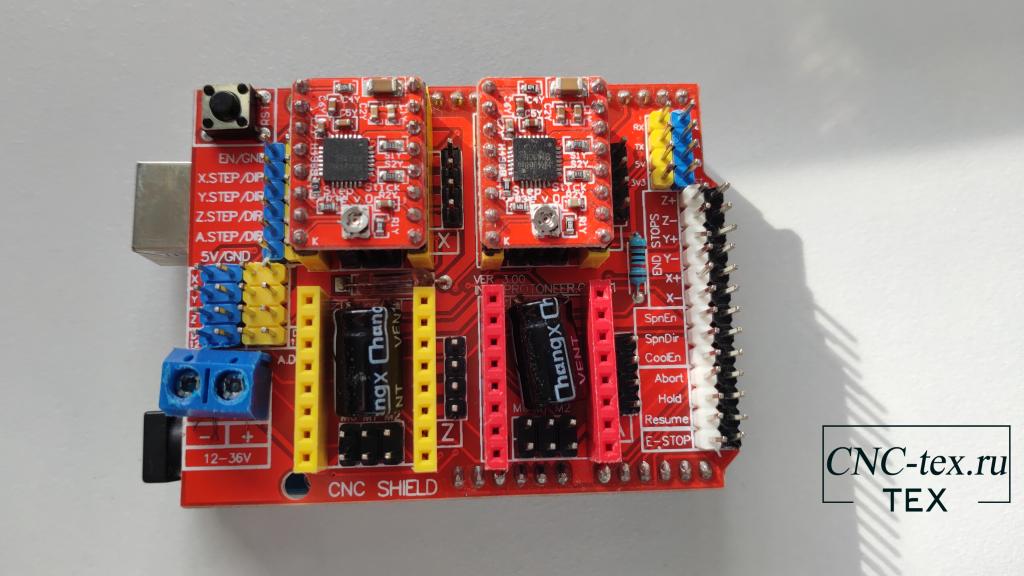
Драйвер A4988 можно установить на CNC shield v3 и CNC shield v4. CNC shield используются для управления ЧПУ станками и облегчают сборку электроники.
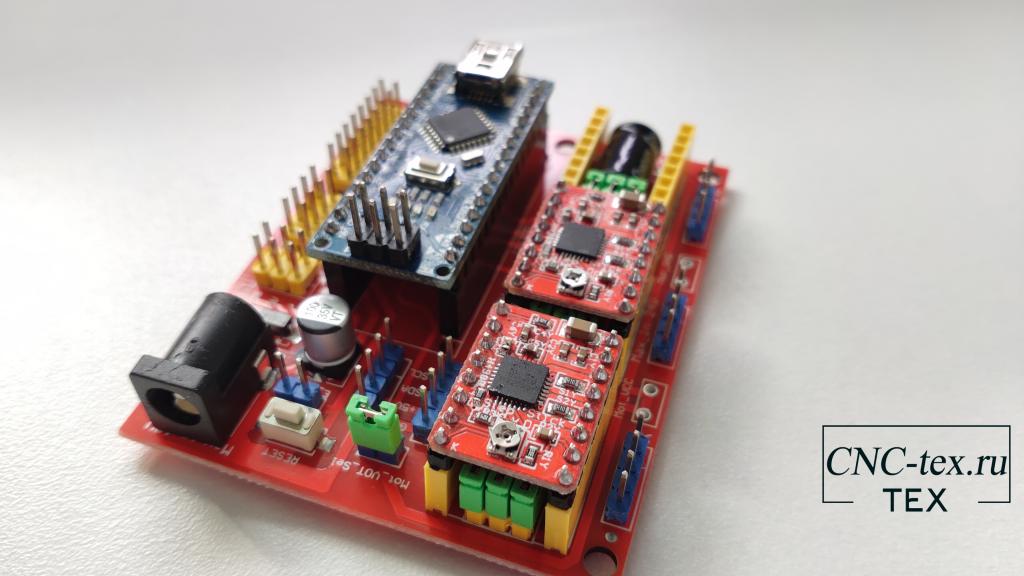
Данный набор позволяет без пайки собрать электронику для двух осевых, трех осевых, четырех осевых ЧПУ станков, а также для самостоятельной сборки 3D принтеров. При реализации ЧПУ станков данные шилды используются достаточно часто благодаря своей низкой цене и простоте сборки.
Мы еще не рассмотрели использование данных драйверов для создания 3D принтеров на основе Ramps. Но это совсем другая история.
Вывод можно сделать следующий. Не смотря на свою небольшую стоимость и небольшой размер, драйвера отлично подходят для реализации большого количества проектов. От самодельных станков, до роботов манипуляторов.
Понравился Драйвер шагового двигателя A4988? Не забудь поделиться с друзьями в соц. сетях.
А также подписаться на наш канал на YouTube, вступить в группу Вконтакте, в группу на Facebook.
Спасибо за внимание!
Технологии начинаются с простого!
Фотографии к статье





Файлы для скачивания
| A4988 Datasheet (PDF).pdf | 377 Kb | 1387 | Скачать |
Доброе время суток Хотелось спросить по A4988 и библиоьеке AccelStepper вам доводилось писать код под спидометр и тахометр. У меня есть скетч в качестве тест стрелок (спидометр,тахометр но проблема в написании продолжения кода. К сожалению в программирование я только учусь. Вы можете как то помочь?

Обзор электроники для ЧПУ
14 сентября , 2020
Комментариев:1
Файлов для скачивания:1
Фото:5
Понравилась статья? Нажми
Читайте также
Мы в соц сетях


Комментарии