Сегодня пришло время применить полученные знания в предыдущих статьях и уроках по самостоятельной сборке ЧПУ станков. Используя полученные знания, мы сможем перемещать самодельную каретку для ЧПУ станка, собирать которую будем из подручных материалов с использованием ручного инструмента. И это может сделать каждый у себя дома.
Перед сборкой каретки для ЧПУ станка, я посетил канцелярский магазин. Вы скажите, что что-то тут не так. Зачем нам в канцелярский магазин? Дети уже собраны в школу. Нет, это не для ребенка. А точнее, для большого ребёнка, то есть для меня! В отделе ручек и карандашей купил химический карандаш и глеевую ручку. Карандаш и ручку покупал в магазине ОФИСМАГ. Если в вашем городе есть такой магазин, то вы можете купить карандаш и ручку по штрих-коду данных комплектующих, фото ниже.
Для создания каретки ЧПУ станка нам понадобится 2 карандаша и 4 ручки.
Чтобы сделать что-то на подобии "линейных подшипников", буду использовать перемычку между ножек старого стула, из которого вырежу брусочки длиной 6 см. Делаю сквозное отверстия сверлом 6 мм. И по краям сверлом 8 мм отверстия для установки пластиковых втулок, которые будут скользить по карандашу.

В итоге, вот такие самодельные линейные направляющие получаются. Конечно, это громко сказано «линейные направляющие», но со своей функцией данная конструкция справляется, что наглядно показано в видео.
Ходовой винт сделал из шпильки М6 и удлинённой гайки, также на М6. Чтобы соединить шпильку с валом двигателя NEMA17, делаю соединительную муфту, также из подручных деталей. А именно из колпачка от медицинской иглы.

Подрезав колпачок нужной длины, надеваю его на вал двигателя NEMA17. На вторю сторону наворачиваю шпильку М6 так, чтобы шпилька и вал уперлись друг в друга, - это обеспечит максимально жесткое соединение.
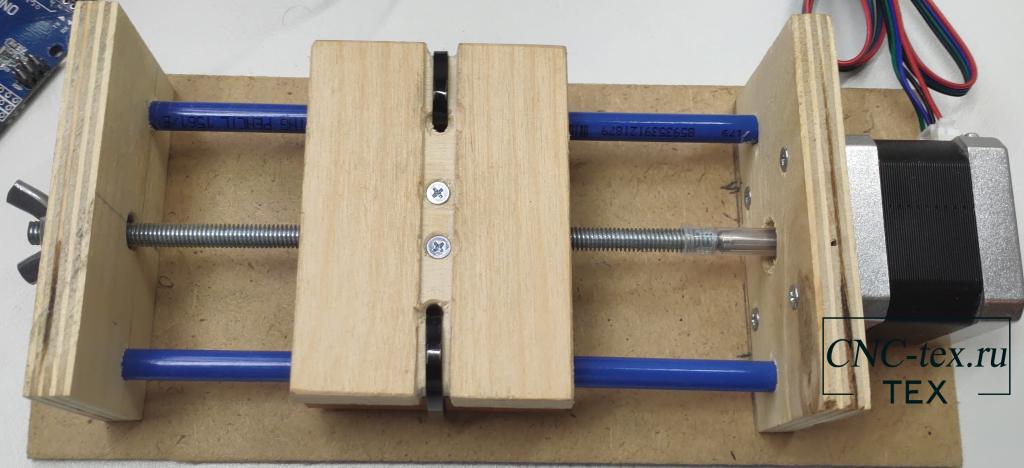
Сейчас все нужно закрепить. Вырезаю из фанеры 2 заготовки. Делаю разметку и просверливаю отверстия для крепления карандашей. Отверстия должны быть сделаны максимально точно на обеих заготовках, что обеспечит плавное перемещение каретки по ним. В противном случае, каретку может перекосить, и будут пропуски шагов двигателя, кроме этого, возможна остановка перемещения в данном месте. Чего нам не нужно. В центре заготовок из фанеры делаю отверстия диаметрам 7 мм,для установки ходового винта. На одной заготовке рассверливаю отверстие до 10 мм. Это необходимо для того, чтобы наша муфта не задевала. Кроме этого, нужно сделать дополнительно 4 отверстия на 3,5 мм для крепления шагового двигателя.
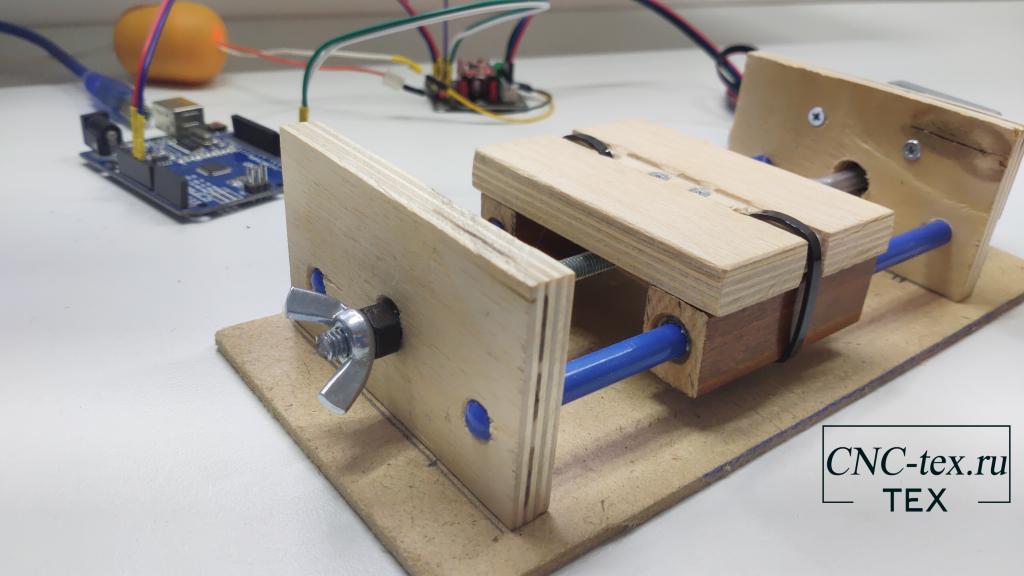
Устанавливаю все детали в заранее подготовленные места. Сверху на направляющие и ходовой винт устанавливаю кусок фанеры. Дальше приступаю к фиксации данной заготовки. Для этого в заранее просверленные отверстия в небольшом куске фанеры, с помощью двух винтов на М3 креплю гайку ходового винта. На верхней фанере каретки также сделал 2 отверстия с небольшими пазами для того, чтобы линейные направляющие закрепить с помощью нейлоновых стяжек.
На ходовой винт, с противоположной стороны от шагового двигателя, наворачиваю гайку и гайку-барашек, которая позволяет перемещать каретку вручную в нужное положение. Данная функция бывает необходимой при выполнении ряда действий.
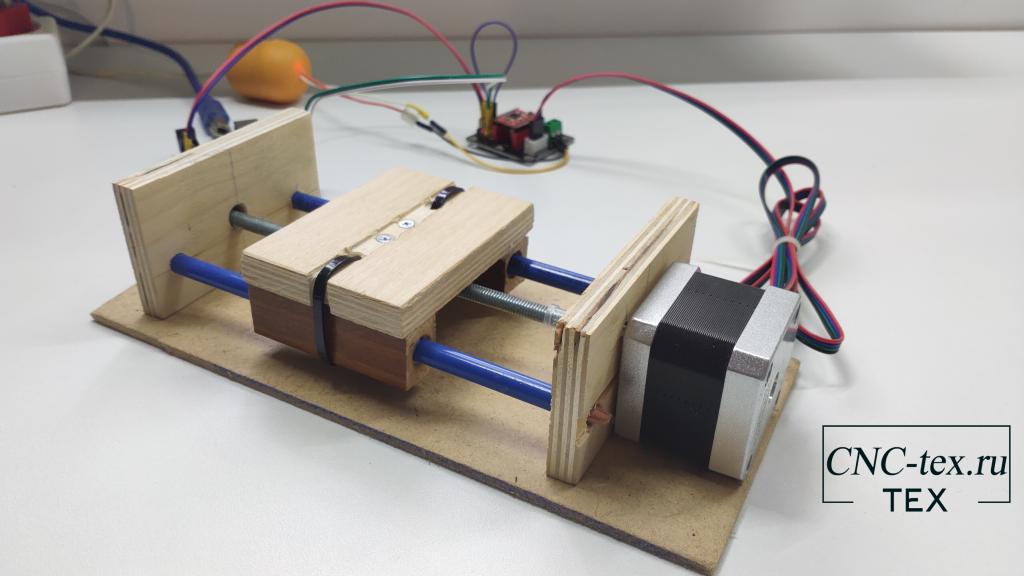
Собранный механизм закрепляю на обрезке МДФ с помощью 4 саморезов.
Получилась вот такая каретка для ЧПУ станка из подручных материалов. Пора проверить ее в работе, а для этого воспользуемся знаниями, которые мы получили в предыдущих статьях и уроках.
Внимание! Чертежи выкладывать не вижу смысла. У вас все размеры могут получиться другими, в связи с использованием нестандартных элементов для создания аналогов «линейных подшипников». Если вам все же нужны чертежи, напишите об этом в комментарии.
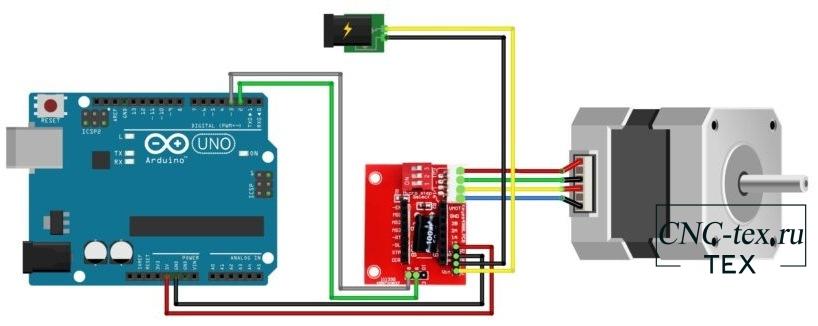
Из предыдущих статей, в частности из: «Модуль для подключения драйверов A4988 и DRV8825», мы уже знаем, что для управления шаговым двигателем нужно:
Подключаем все по схеме.
Код для проверки работоспособности каретки для ЧПУ станка возьмём из урока подключения драйвера A4988 (DRV8825) к Arduino, и доработаем его так, чтобы работа катерки была наглядная.
// Подключаем библиотеку AccelStepper
#include <AccelStepper.h>
// Устанавливаем выводы
const int dirPin = 2;
const int stepPin = 3;
int i = 0;
// Определение тип интерфейса двигателя
#define motorInterfaceType 1
// Создаем экземпляр
AccelStepper myStepper(motorInterfaceType, stepPin, dirPin);
void setup() {
// Устанавливаем максимальную скорость, коэффициент ускорения,
// начальную скорость и целевую позицию
myStepper.setMaxSpeed(1000); // Установка максимальной скорости (оборотов в минуту)
myStepper.setAcceleration(50); // Установка ускорения, в шагах в секунду за секунду
myStepper.setSpeed(200); // Установить скорость (в шагах за секунду). Само движение запускается функцией runSpeed()
myStepper.moveTo(100); // Переместиться в абсолютно указанное положение. Само движение запускается функцией run()
}
void loop() {
// Изменение направления вращения, когда двигатель достигнет заданного положения
if (myStepper.distanceToGo() == 0)
{
myStepper.moveTo(-myStepper.currentPosition());
}
// Передвинуть на 1 шаг
myStepper.run();
}
Для этого увеличим максимальную скорость вращения.
mystepper.setMaxSpeed(4000); // Установка максимальной скорости (оборотов в минуту)
Также увеличим ускорение, чтобы двигатель быстрее набирал заданную скорость вращения.
mystepper.setAcceleration(400); // Установка ускорения, в шагах в секунду за секунду
Установим скорость.
mystepper.setSpeed(1200); // Установить скорость (в шагах за секунду). Само движение запускается функцией runSpeed()
Установим количество шагов, которые нужно сделать в одну сторону, а затем в другую, от нулевой точки. Соответственно шагов в сумме будет 10000. При включении, двигатель делает 5000 шагов по часовой, а заем возвращаемся в нулевую точку (откуда начали движения) и делает -5000 шагов против часовой стрелки. Знак «-» означает, что движение в противоположном направлении от нулевой точки. В связи с чем, у нас получается 10 000 шагов, т.е. 50 оборотов в одну строну и столько же в противоположном направлении.
mystepper.moveTo(5000); // Переместиться в абсолютно указанное положение. Само движение запускается функцией run()
Остальной код оставляем без изменений. Для тестирования этого достаточно. Если вам интересно, можете написать боле сложную функцию управления двигателем.
Каретка перемещается достаточно быстро, но при увеличении скорости начинается вибрация, которая приводит к перемещению устройства по столу. При установке деления шага ½ скорость снижается, каретка начинает перемещаться более плавно и вибрация уменьшается.
Каретку для небольшого ЧПУ станка можно сделать из подручных материалов, и при этом потратить на сборку небольшое количество времени и средств.
Фотографии к статье




Файлы для скачивания
| Код Arduino UNO для управления самодельной кареткой.ino | 1 Kb | 818 | Скачать |
А не могли бы Вы показать фото с низу. Действительно, не особо понятно, как вы закрепили ходовой механизм к винту.
выложите пожалуйста чертежи каретки пожалуйста
![]()
Добрый день. Не могли бы вы поделиться чертежами каретки? Думаю даже для того чтобы просто сориентироваться в размерах они были бы не лишними.Практически все детали нестандартные. Даже карандаши могут быть разной толщины и длины. Поэтому не вижу смысла в чертежах.
Добрый день. Не могли бы вы поделиться чертежами каретки? Думаю даже для того чтобы просто сориентироваться в размерах они были бы не лишними.
P.s. статья супер.
Непонятно, как вы закрепили винтами М3 гайку ходового винта

Поэтапная сборка ЧПУ станков
27 октября , 2020
Комментариев:5
Файлов для скачивания:1
Фото:4
Понравилась статья? Нажми
Читайте также
Мы в соц сетях


Комментарии